成果介绍
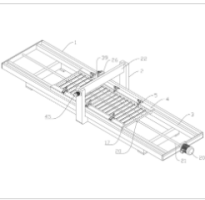
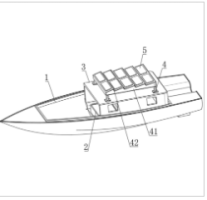
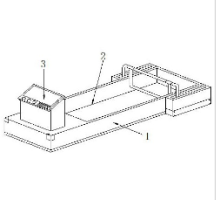
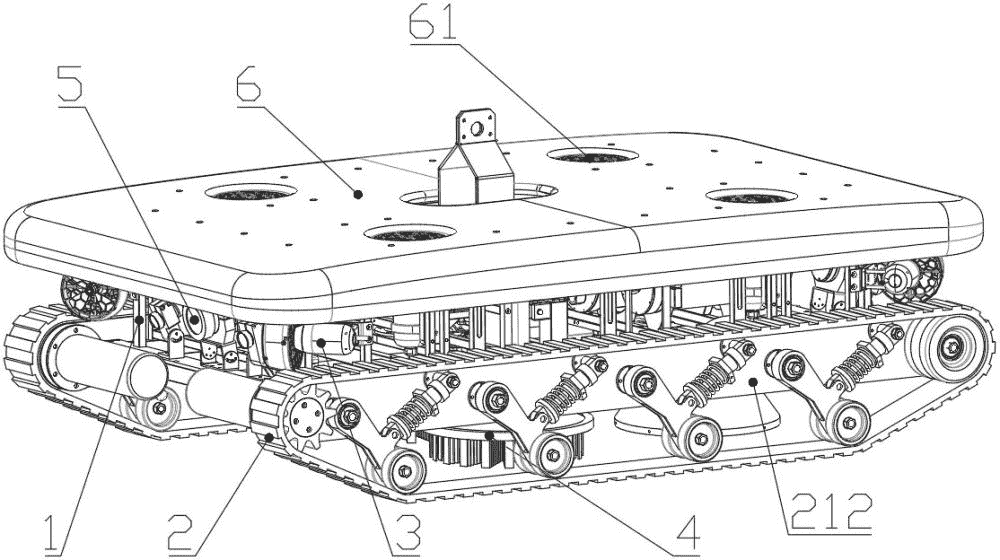
本发明公开了一种水下船舶清洗机器人,涉及海洋船舶工业领域。该机器人包括主体框架、履带行走机构、推进系统、清洗系统、传感及控制配电系统及浮力模块。主体框架采用螺栓连接的硬质氧化铝合金长条连接件,可实现快速装配且避免温度变形导致装配困难和焊缝开裂问题。清洗系统集成电动硬质钢刷盘和旋转空化射流,可根据附着物厚度自适应切换。电动刷盘系统配有电动伸缩杆,可通过上位机控制刷盘贴附力度,避免固定钢刷伤漆的风险。通过检测刷盘电机电流变化,间接判断海生物附着物厚度,进而调整履带行进速度。履带行走机构中设有弹簧装置,有效适应船体曲面,同时可通过改变推进器贴壁推力来调整空化射流喷头靶距,提高空化射流的稳定性。
所属产业
海工装备
所有权人/单位
哈尔滨工业大学(威海)
成果分类
海洋装备制造
联系方式(电话)
18150019696;17350754772
专利类别
发明专利
申请号或专利号
CN202410732097.9
申请日期
2024-06-06
成果流程