成果介绍
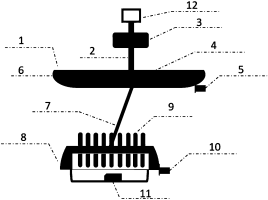
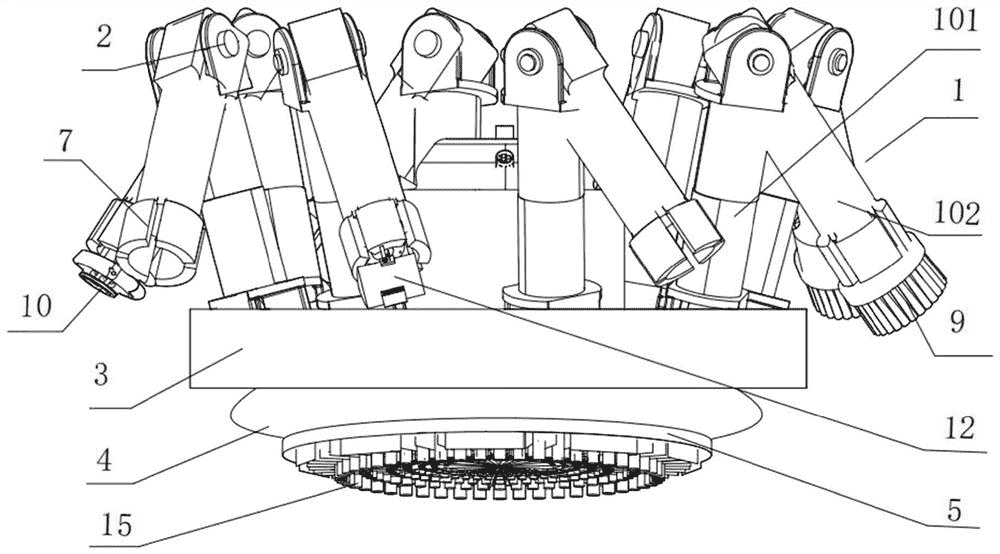
本发明涉及船底清污机器人技术领域,公开一种仿生水母与蜘蛛式船底清污机器人,包括电磁铁吸盘和环设于电磁铁吸盘的可伸缩转向机械臂,所述电磁铁吸盘下方设置有清洁装置;所述可伸缩转向机械臂包括有可伸缩机械臂、万向轴承和下端机械臂,所述下端机械臂通过万向轴承与可伸缩机械臂连接,所述可伸缩机械臂与电磁铁吸盘连接,在其中至少1个下端机械臂的自由端设置有臂端电磁铁吸盘。通过设置可伸缩转向机械臂,使机器人可如水母游行,也可反向附着船底如蜘蛛爬行。通过刮刷盘的设置,配合底部安置的气囊可使顶部刮刷盘多角度多方位地清洁,辅助以喷水刷头,可对不易清洁角落进行清污。
所属产业
海工装备,智慧海洋
所有权人/单位
广东海洋大学
成果分类
海洋高技术服务
联系方式(电话)
18150019696;17350754772
专利类别
发明专利
申请号或专利号
CN202211330027.8
申请日期
2022-10-27
成果流程