成果介绍
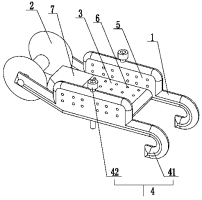
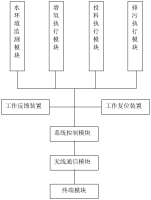
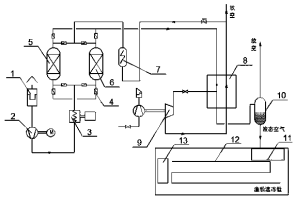
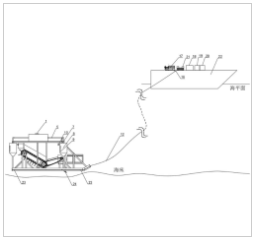
本发明公开了一种浅海底播蛤仔采收装置的姿态控制系统,其包括:四个浮箱,分别安装在采收平台的四角,采收平台通过牵引缆绳与作业船体连接,并由作业船体拖拽;每个浮箱通过通气阀与气源系统连接,并通过进水阀控制进水,浮箱内部设置有液位传感器;调节浮箱的浮力过程中,通过控制通气阀以及进水阀,调节浮箱内部的气压及水位以调整其浮力;电气控制系统分别与采收平台上的传感器连接,根据传感器的检测结果控制采收平台四个浮箱的浮力,从而控制采收平台的姿态。该系统可检测采收设备位置姿态信息,进行姿态平衡补偿控制,避免设备陷入海底砂石中,导致牵引力增加,损坏设备,也可实现设备在采收过程减阻低损挖掘,减少对海底生态环境的破坏。
所属产业
深海养殖,水产种业
所有权人/单位
中国水产科学研究院渔业机械仪器研究所
成果分类
海洋高技术服务
联系人
18150019696;15159723275
所在地区
江苏省
专利类别
发明专利
申请号或专利号
CN202411040093.0
申请日期
2024-07-31
成果流程