成果介绍
高性能船包含高速单体船、半滑行单体船、穿浪双体船、小水线面双体船和三体船等在高速航行过程中,由于海洋环境影响引起船舶的纵摇和垂向加速度,会导致乘员晕船、身体不适以及造成短时的设备失效。多翼面船体姿态控制技术就是通过在船体上装备的减摇鳍、纵倾调整尾板(压浪板)、T形水翼、船尾拦截器和稳定翼等(或是以上装置的组合),并通过智能策略,来综合控制船体多个自由度的运动,提升船体耐波和操纵性能,改善船员乘船的舒适度。
技术特点:
(1)控制器核心技术为基于多翼面的船体姿态综合控制技术,实时控制算法的设计是在MIMO模型基础上,基于非线性控制理论。同时采用嵌入式系统,加载快速模型预测算法,设计适合各种航行条件的控制器。
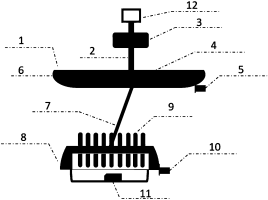
(2)纵倾调整尾板是铰接方式安装在船体上的平板结构,它用液压伺服系统驱动。通过改变尾板的角度,可以改变作用在船上的纵倾力矩,从而使纵摇幅度减少,有效改善了船体纵向运动,此外。通过添加可独立操作的翼板,实现横摇和纵摇的联合减摇控制。
(3)T形水翼安装于船体艏部,穿浪双体船可安装于船艏下端,有效的抑制垂荡和纵摇减摇。分为被动和可控两种形式。船低速航行时可收回,以减小阻力。可伸展T形水翼为本公司专利技术。
(4)拦截板安装在船尾的底部,当拦截板向下伸出到船底水流时,在船尾底产生起压力,通过压力而形成的升力能够减小船体纵向运动,运动幅度的减少使船体的兴波阻力减少。相对纵倾调整尾板,结构简单,适应范围广。
所属产业
智慧海洋,其他
所有权人/单位
哈尔滨工程大学
专利状态
可产业化
合作方式
其他
联系方式(电话)
18150019696;17350754772
成果流程