成果介绍
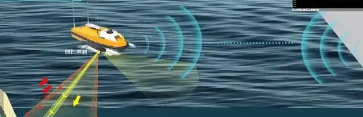
本发明涉及一种无人船航迹规划方法、终端设备及存储介质,在该方法中,包括以下步骤:步骤一:根据障碍物分布情况,使用栅格法建立航行区域的二维静态环境模型;步骤二:设定无人船航行的总时间 T 的计算公式。步骤三:根据蚁群算法对无人船进行航迹规划,根据无人船航行的总时间对蚁群算法中的信息素进行更新。本发明根据转弯航行航速会小于直行航速,且转弯角度越大,其航速越
小的情况,将蚁群算法中的信息素更新方式设定为根据总的时间来进行更新,而缩短航行时间对于无人船的救援任务顺利执行有重大意义,因此更贴近实际需求情况。
所属产业
其他
所有权人/单位
集美大学
专利状态
中试阶段
合作方式
其他
联系方式(电话)
18150019696;17350754772
成果流程