作者:吴忠胜,王 楠(上海诺基亚贝尔股份有限公司,上海市 201206)
摘要:为了实现空天地海一体化通信的 6G 愿景,可以使用蓝绿激光进行水下通信。根据与潜航器通信的不同方式,将基于 VLC(可见光通信)的 6G 海洋水下通信方案分为以下三种:岸边 6G 基站 + 无人机;卫星直联;卫星 + 船载 6G 基站。文章详细说明各方案的工作原理和流程,并对比不同方案在适用海域、现场部署速度、成本这三个方面的优劣。
关键词: VLC(可见光通信);6G;水下通信
可见光通信是一种利用波长在 380~790 nm 范围内的可见光进行数据通信的无线光传输技术[1]。此外,可见光通信兼具照明、通信和控制定位等功能,且具有安全性高、功耗低、频谱无需授权和抗电磁干扰等优势,是 6G 候选技术之一[2]。复旦大学研发的可见光通信系统的数据传输速率已经超过了24 Gbit/s(8 波束)[3]。很多市场研究机构均认为可见光通信技术具有非常广阔的发展前景。实现空天地海一体化通信是 6G 的重要愿景。在商业开发和科学研究中,潜航器和水下通信的使用,如水下施工、水下勘探、水下搜救和打捞、水下考古、水底地貌测绘、水下观光、深海养殖监控等越来越普遍。早在 1970 年代,潜航器使用蓝绿激光进行水下通信就被提出并证实了。1963 年,S.A.Sullian 及 S.Q.Dimtley 等人在研究光波在海洋中的传播特性时,发现海水中波长450~530 nm 蓝绿光的衰减比其他光波段的衰减要小很多,证实在海洋中亦存在一个类似于大气中的透光窗口。1981 年,美国海军在美国圣地亚哥海域在 12 000 m 高度的 T-39 飞机上与水下 300 m 深的“海豚”号潜艇进行了激光通信实验。1985 年在加利福尼亚州附近,装在“剑套”卫星上的激光器与“海豚”号潜艇进行了激光通信实验,潜艇深度 250 m、航速 30 节(55.56 km/h),通信容量达每秒数千字节,结果令人满意[4]。各国科研人员还进行了长续航时间的模拟无人驾驶飞机与以正常下潜深度和航速航行的潜艇间的双工激光通信可行性试验,证实了利用蓝绿激光在大暴雨、海水浑浊等恶劣条件下也能进行通信,也证实了在海水中,蓝绿激光信号的最大穿透深度可以大于 600 m。另外,使用蓝绿激光进行水下通信还有下列优点:数据传输速率快、传输范围大、器件尺寸小、功耗低和抗干扰能力强等。下面将介绍基于 VLC(可见光通信)的 6G 海洋水下通信方案。我们根据各方案的不同特点,根据与潜航器的不同通信方式,将基于 VLC 的 6G 海洋水下通信解决方案分为以下三种进行阐述:岸边 6G 基站 + 无人机方案(如图 1 所示)、卫星直联方案、卫星 + 船载 6G 基站方案。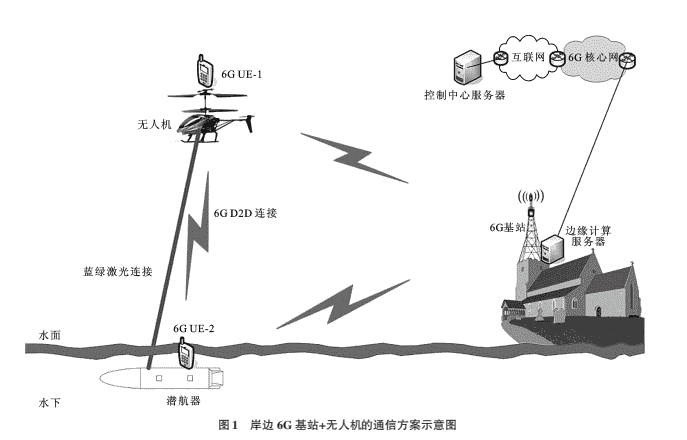
2.1 岸边 6G 基站+无人机
岸边 6G 基站 + 无人机方案的全称是基于岸边6G 基站的无人机 D2D(设备到设备)通信方案。该方案的工作原理是:依托部署在岸边的 6G 基站,让潜航器、水面上的无人机(两者均安装了蓝绿激光收发器和 6G 用户终端)和岸边 6G 基站之间快速地建立通信链路,并且始终保持双向实时通信。
当潜航器还未完全下潜到水下时,可以在潜航器与无人机之间建立 6G D2D 通信链路,借此帮助潜航器与无人机之间更便捷和高效地建立激光D2D 通信链路,辅助激光对准操作。在潜航器和无人机之间的 6G D2D 通信链路和激光 D2D 通信链路的切换机制,即建立与断开逻辑,能够始终保持潜航器与无人机之间的双向实时通信。
将能够提供连续广域覆盖的 6G 基站作为地面基地,使得安装了 6G UE(用户终端)的无人机能够更容易找到与地面基地之间的直接通信链路,从而由无人机作为桥梁,潜航器与水面上的基地之间将始终保持不间断的实时信息传输。
基于 6G 基站的协助,可以更加适时和快速地建立潜航器与无人机之间的 D2D 通信链路。在潜航器下潜期间,无人机通过与潜航器的 6GD2D 连接,辅助潜航器与无人机尽快建立起稳定的蓝绿激光通信连接,从而始终让潜航器和 6G 基站处于不间断的双向实时通信状态,以确保潜航器的安全。潜航器下潜期间的具体工作流程如下:
a)潜航器向 6G 基站发送包含潜航器位置信息的下潜指示信息,暂停下潜。b)6G 基站通知无人机飞向潜航器所在的目标水域上方的空域。c)当无人机到达目标水域上方的空域后,与潜航器建立 6G D2D 通信链路。d)6G D2D 通信链路能确保潜航器不间断地与地面的双向实时通信,帮助无人机与潜航器之间更便捷高效地建立激光 D2D 通信链路。e)潜航器断开与无人机的 6G D2D 通信链路,并继续下潜。f) 潜航器在水下潜航时通过激光 D2D 通信链路与无人机保持双向实时通信。在潜航器上浮期间,无人机通过与 6G 基站的6G D2D 连接,尽快让潜航器和 6G 基站建立起稳定的双向直接实时通信状态,以减少无人机对能量的消耗。潜航器上浮期间的具体工作流程如下:a) 潜航器通过激光 D2D 通信链路告知无人机已开始上浮。b)潜航器一旦从水下浮上水面,将尝试接入 6G基站。c)若潜航器可直接接入 6G 基站,则潜航器断开与无人机之间的激光 D2D 通信链路,6G 基站通知无人机飞回降落点。若潜航器不能直接接入 6G基站,潜航器与无人机之间建立 6G D2D 通信链路,然后断开与无人机之间的激光 D2D 通信链路。潜航器继续尝试接入 6G 基站直至成功,然后断开与无人机之间的 6G D2D 通信链路,6G 基站通知无人机飞回降落点。当然,如果对于传输速率和时延要求不高的话,本方案中的 6G 基站及 6G UE 也可以用 5G 基站及5G UE 来代替。2.2 卫星直联
基于卫星直联的通信方案如图 2 所示。卫星直联方案的全称是:基于卫星星载蓝绿激光收发器的方案。该方案的主要原理是:GEO(地球同步轨道卫星)和 LEO(低地球轨道卫星)通过星间互联共同组成了天基网络。低地球轨道卫星 LEO-1 安装了蓝绿激光收发器和 6G 无线信号收发模块,作为地面信关站与潜航器之间的中继节点建立起通信连接。其中,地面信关站通过下行链路获取 LEO-1 卫星节点的状态信息,通过上行链路将潜航器上的用户终端请求响应先发送给 LEO-1 卫星节点,再由LEO-1 卫星节点通过蓝绿激光链路转发给潜航器上的用户终端,并响应用户终端的请求。该链路建立时也需要进行激光对准等细节操作,此处不再赘述。当然,从相对遥远的卫星轨道与水下的潜航器直接建立蓝绿激光连接,对于蓝绿激光收放器件、激光束快速对准设备的要求都非常高。因此,这种方案目前的成本还相当昂贵,通常只适用于军用潜艇等高价值目标以及水下海难人员援救等紧急情况。2.3 卫星+船载 6G 基站
卫星 + 船载 6G 基站方案的全称是:基于卫星及船载 6G 基站的方案。上述岸边 6G 基站 + 无人机的方案显然只能在近海使用,有非常大的局限性。但是,我们在上述前两种方案的基础上,构造出基于卫星及船载基站的方案。这样,就可以在深远海域与潜航器进行蓝绿激光水下通信了。卫星 + 船载 6G 基站的通信方案如图 3 所示。海面上的通信中继船上安装有与卫星进行通信的船载信关站,同时还安装有小型的 6G 基站及 6G 核心网。船载 6G 基站与负责水下蓝绿激光通信的 VLC模块直接相连,上述 VLC 模块通过蓝绿激光对准等一系列操作与水下的潜航器建立并保持双向激光通信连接。另外,天基网络中的低地球轨道卫星 LEO-1(无需安装蓝绿激光收发器)作为船载信关站与地面信关站之间的中继节点,负责建立起船载信关站与地面信关站的通信连接。为节约带宽资源,这条中继线路只传输最急需、实时性要求最高的重要信息。一旦潜航器浮出水面,将采用 6G 无线接入技术与船载 6G 基站建立通信连接。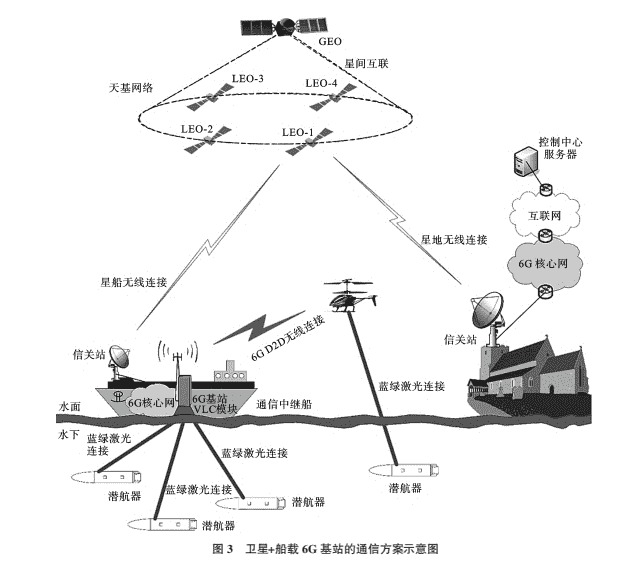
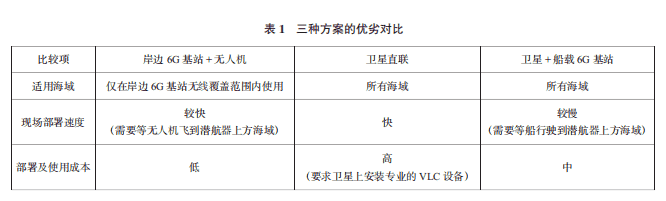
为了拓展潜航器的工作范围并提高通信效率,通信中继船上也可以搭载蓝绿激光收发器和安装6G UE 的无人机,相应的工作原理及操作流程可参照 2.1 小节的内容。此时,2.1 小节中的岸边 6G 基站的功能由通信中继船上的船载 6G 基站替代。值得注意的是,在上述三种方案中,如何实现通信双方激光束的快速对准始终是一个需要解决的重点问题。幸运的是,近年来有一些学者在研究可见光通信技术与智能反射面技术的结合,而且已经取得了一些重要进展。用智能反射面来辅助可见光通信,可以提高目标用户的接收信号功率,克服可见光通信的某些局限,例如,控制 VLC 入射光束的角度以改善 VLC 接收端的 FOV(视场角)[8]。还有,把智能反射面放在VLC 发射端的前端,可以调整并控制 VLC LED 光束的宽度和 FOV,扩大可见光通信的接收范围,还可以使 VLC 光束集中或具有特定的方向性[9]。上述研究成果都有助于解决水下蓝绿激光通信双方的光束快速对准问题。上述方案各有优劣,我们从适用海域、现场部署速度、成本三个方面进行对比,见表 1。需要注意的是,虽然美国海军已证实在飞机上使用蓝绿激光可以和冰面下的潜艇进行通信,但军用设备功率较高,民用设备相应的测试结果尚未有公开报道。另外,表 1 中的“所有海域”指的是没有冰面覆盖的所有海域。随着各种潜航器在不同行业的应用越来越普遍,人们对 6G 愿景中的空天地海一体化通信的需求越来越迫切。希望本文内容对于早日实现 6G 空天地海一体化通信能够有所帮助。1.迟楠,陈慧. 高速可见光通信的前沿研究进展[J]. 光电工程,2020,47(3):6-17.
2.张平,李文璟,牛凯,等. 6G 需求与愿景[M]. 北京:人民邮电出版社,2021.□
3.HU F C,CHEN S Q,LI G Q,et al. Si-substrate LEDs with multiple superlattice interlayers for beyond 24 Gbit/s visible light communication [J]. Photonics Research,2021(8):1581-1591.
4.奚小明. 蓝绿激光对潜通信综述[J]. 中国科技信息,2007(22):326,329.□
5.吴晓文,焦侦丰,刘冰,等. 面向 6G 的卫星通感一体化[J].
移动通信,2022,46(10):2-11.□
6.韩珍珍. 星地融合网络组网和路由的关键技术研究[D].
重庆:重庆邮电大学,2021.□
7.季新生,黄开枝,邬江兴,等. 6G 天地一体化信息网络内生
安全技术[J]. 天地一体化信息网络,2023,4(2):2-12.□
8.NDJIONGUE A R,NGATCHED T,DOBRE O A,et al. Toward the use of re-configurable intelligent surfaces in VLC systems:beam steering [J]. IEEE Wireless Communications,2021,28(3):156-162.□
9.ABUMARSHOUD H,MOHJAZI L,DOBRE O A,et al. LiFi through reconfigurable intelligent surfaces:a new frontier for 6G [J]. IEEE Vehicular Technology Magazine,2022,17(1):37-46.




