成果介绍
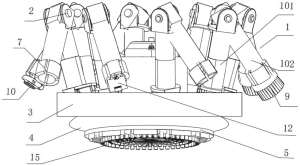
课题组搭建的水下机器人才用了经典的水下螺旋桨6桨的布局模式,并且在水平面上的4桨采用的是每个螺旋桨的夹角分别是45°,保证水下机器人在水下的灵活度,可以在水下进行前后左右移动,并且各个方向产生的的推力大小相当,于此同时,水下机器人的四个螺旋桨采用可以同时产生相同方向的推力,使得机器人可以在原地进行360°的快速旋转作业,满足水下机器人的高灵活度要求。水下机器人的潜浮是通过两个垂直的矢量推进器来完成,通过对可以实现水下的定深悬浮和水下的横摇动作。
所属产业
海工装备,智慧海洋
所有权人/单位
福州大学
专利状态
可产业化
合作方式
技术入股,合作开发,其它
联系方式(电话)
18150019696;17350754772
所在地区
福建省/福州市
成果流程