作者:马少妍1,徐 猛2,李 森2(1.青岛海上综合试验场有限公司,2.青岛海洋工程水下设备检测有限公司,山东 青岛 266200)
摘要:海底油气管道多采用大口径钢制管道,该种管道由于长时间浸没于海水中难免会受海水的腐蚀,而长时间的腐蚀会导致管道防腐层及本体逐级变薄或脱落或者泄露,目前国内外多采用在管道接触面铺设牺牲阳极块来实现阴极保护来进行延寿。为快速评价阴极保护效果同时合理评价铺设效果,通常使用水下无人机器人,进行牺牲阳极块的相关测量工作,该工作可大幅度减少人工作业时长,提高施工效率,减少人员在水下潜水作业的风险,降低总工程成本,保障了管道铺设的整体安全性与实效性。
关键词:水下机器人;海底油气管道;阴极保护;检测
随着工业发展对能源的迫切需求,陆上可用能源开采量逐渐增加及工程技术的发展逐渐成熟,海洋能源特别是海洋油气能源的发展得到了全世界普遍关注与重视,相应的海洋工程结构性平台及海底油气运输管道铺设的重要性也日益凸显,特别是近岸海洋油气的大力开发更加迫切需要使用海洋工程结构物(例如海上风电设施、潮汐能发电设施,海上光伏设施以及海洋油气钻采设备)及海底油气集输管道。海底油气集输管道是连接海上油气井平台与海上系泊系统或者陆地终端的重要枢纽目前世界海底集输管道的建成已有近70年的历史中国海底集输管道也有近40年的发展历程。国内海底管道总长已超六千千米。目前管道在设计应用阶段已考虑采用在管道上涂抹防护层与阴极保护相融合的形式,而阴极保护主要采用牺牲阳极与外加强制电流的形式,对水下结构物及管道开展的阴极保护测量,主要是测量各测量点阳极输出电流、电位等数值,过去多通过强制电流实现阴极保护。随着阳极块材质逐渐升级换代,特别是国内外阴极保护经验的富集与积累,以及考虑长期运维成本,更多的海洋结构物平台及海底管道开始采用牺牲阳极的方法进行保护。长时间的海水浸泡会导致管道外部防腐层的脱落以及阳极块的消耗,一日阳极块耗尽会消耗管道本体,严重的会导致管道泄露,从而会导致油气发生泄露,不仅有浪费资源污染环境的风险,更会致使生产停滞。目前管道与海上结构物受海水腐蚀造成的损失已占运维成本的较大比例,2020年中国工程院调查表明,中国年腐蚀成本可达3万亿元人民币。特别对于电缆和水下结构金属相连的阳极应采取更加严格的保护措施,多会对电缆进行额外的铠装保护以避免因船只、波浪等外界动力因素造成的破坏。对于钢制油气管道铺设完成后,往往会受潮汐水动力的影响:潮汐带来的污泥覆盖也会影响阳极的工作性能针对这种情况也应采取一定的额外保护。目前海底油气集输管道阴极保护作业主要有水下无人机器人作业与专业潜水人员水下作业两种,对于船舶不便靠近的极浅水区域或者海底地形较为复杂区域,可采用潜水员进行补充作业。受近岸及海底受洋流、潮汐流的影响,特别是水深造成的压力影响以及海水能见度及暗礁等不确定因素的影响,若人员直接在管道附近进行作业风险极高,同时作业效率也较为低下,无法覆盖整个管道路由,因此采用水下无人机器人进行作业安全可靠高效,其推广应用越来越明显,其自身具备人体无法克服的环境适应性能力、长时间工作能力以及安全保护能力。得益于人类对海洋能源的大力开发与技术能力的突破,水下无人机器人的发展也更加成熟。目前海洋工程装备领域多以工业级水下作业机器人为主,其技术仍以欧美及日本等国家较为成熟,其应用深度可达水深 3000米。目前国内水下机器人的发展已取得长足进步但仍然存在一定差距。目前国内水下机器人在科考应用领域已达到全海深级别,但工业级应用机器人特别是深水级仍存在一定的差距。根据其动力来源、运动形式的不同主要发展为两大类型机器人。主要根据水下机器人是否与母船进行脐带缆连接进行划分,可分为有缆无人水下机器人(简称水下机器人,Remote OperatedVehicle)与无缆自主式水下机器人(简称 AUV,Autonomous Underwater Vehicle),两者主要区别来自动力源是母船动力供应还是自带供电系统。有缆无人水下机器人(简称水下机器人),不同于载人潜水器,主要通过脐带缆与水面上的母船连接,脐带缆主要负责传输通信及动力源的使命,操作人员在母船上可通过操作安装在有缆无人水下机器人本体上的摄像头及传感器获得海底数据及情况,并利用脐带缆进行信息传输操控有缆无人水下机器人及附属的机械手及作业工具,最终实现水下作业指令传导(图1)。有缆无人系统采用母船给水下本体实时供电传输,保障了有缆无人水下机器人具有功能强大、适应性强,作业灵活,可长时间在海中作业,无限时执行高难度、无水下作业人员风险,复杂海况作业等优点,同时可根据不同区域作业任务进行功能扩展,因此有缆无人水下机器人是海洋工程作业的重要工具,也是世界范围内应用较为广泛、数量最多、类型最全的潜水器。除水体极浅,机器人无法作业的情况下外,其他只要具备基本水深条件,使用有缆无人水下机器人作业可实现整体工程作业的持续性,虽然从船只使用上受到一定的限制,但整体工作效率远高于人工作业,整体成本上大大降低了预算及事故发生的可能性。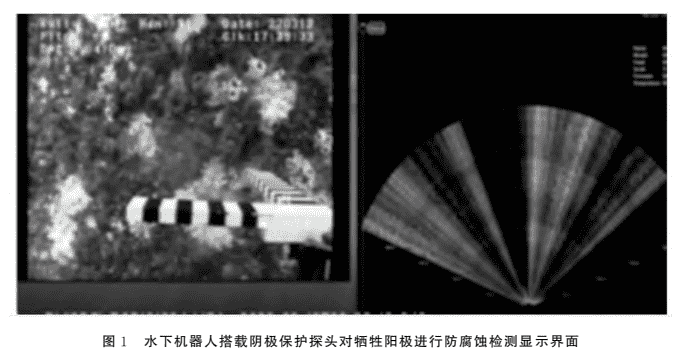
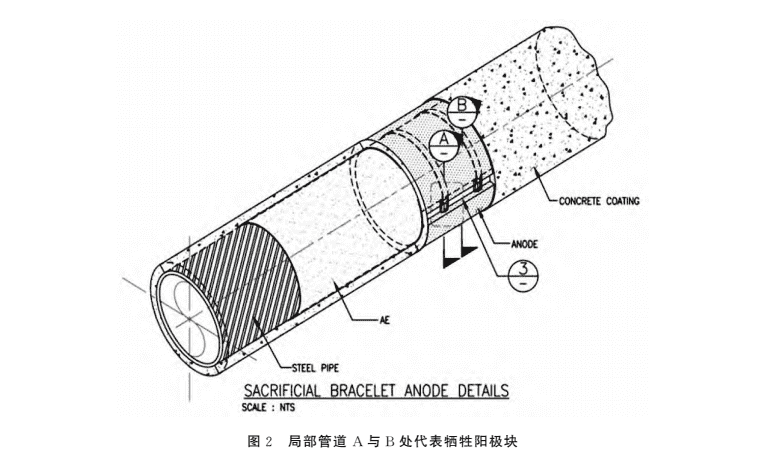
在水下进行管道牺牲阳极测量前,可通过水下机器人对整个管道的走线分布情况进行录像、拍照、扫描成像及数据获取等,利于工程技术人员掌握管道的施工进度及发现工程质量问题。其后可采用具有机械手的水下机器人在管道刚刚铺设完成后或者管道在运维保护阶段进行牺牲阳极测量(图2)。目前国际及国内开展的测量方式较多,以电极下放式、接触式、双电极式、有缆拖拽式、电场梯度式等为主,目前较为常见的以接触式与有缆拖拽式为主,此两种形式主要通过脐带缆连接水下机器人,通过使用机械手与探针搭载的方式,与参比电极的测量获取应用的数据并通过脐带缆实时将数据回传至母船上作为原始数据以便对比分析。根据作业水深与水下环境的不同可选取不同推进力的水下机器人。为保证水下机器人的作业时长及较大作业动力源,用于海底集输管道检测的机器人多选择有缆无人水下机器人,目前国内各海域海上工程装备的年度测量也多以此种机器人开展,本文也以此种机器人为介绍重点。该系统主要以有缆无人水下机器人系统及参比电极构成(表1)。有缆无人水下机器人系统一般由水面控制室(供电系统和甲板控制)脐带缆、光端机、母船、水下机器人水下本体、机械手、吊放回收总成(牵引和储缆绞车及A型架)等组成。
下面分别就有缆无人水下机器人的水面控制室与水下本体部分开展介绍:
3.1 有缆无人水下机器人水面控制室
控制室位于母船之上,母船多根据排水量及作业量进行相应匹配,通常来说应选择大于500 吨位的拖船,船舶甲板空间至少有3x6平方米空间用于水下机器人操控间的存放,2x2平方米用于收放绞车缆,同时匹配可承重大于五百公斤的克隆吊以保证水下机器人的布放。水面控制室主要包括有缆无人水下机器人发送接收信息的设备与供电系统组成。其中发送接收信息设备包括主要由视频管理计算机、声纳计算机、甲板控制计算机、水下机器人操控单元等设备组成。甲板控制计算机控制与监视相关水下机器人功能,同时发送水下机器人动作指令与辅助设备的动作控制的命令,监视所有的传感器和警报并输出。光端机负责传输多种数据协议,为水下装备与甲板设备提供信号间连接。水下机器人操控单元主要是水下机器人各运动方向的控制。甲板供配电系统除可提供电源的启停,还可提供安全互锁保障,电源监控,过载保护,漏电检测等,最终为水下机器人在水下工作提供相对可靠稳定的动力供应。3.2 水下机器人水下本体部分
水下机器人本体主要为一个开放框架结构,该种开放式结构可进行模块化增减提供方便,特别是对构建单元的拆卸与维护提供了便捷,同时减少医水深增加导致的压力影响。该框架多采用铝合金焊接同时辅以耐腐蚀、强度与韧性兼顾的高分子材料构成,其框架顶部装有浮力材块,框架底部一般采用加固模式,同时可安装与更换作业底盘,该底盘可起到保护核心部件不易被磕碰。框架内部含推进系统、液压动力系统、视频与照明系统、云台系统、供配电系统、导航定位系统等装置。通过压载块的重心调节,实现其在水下的稳定性。
在开展海底集输管道检测过程中,如何准确定位机器人与目标的位置是开展检测工作的前提,随着全球定位导航系统的应用,水下机器人可在已设定好的经纬度坐标进行施工作业。但受海水本身对电磁波的屏蔽效应影响,陆地定位技术已无法准确高效满足水下定位,此时就需要使用水下导航定位技术。该项技术可远距离控制水下设备。实际应用中可更加高效准确的开展工程作业,往往将二者技术结合后综合应用。水下机器人可根据前期管道施工图较为准备的开展施工巡查与定位,但受海底洋流及其他外力的影响导致管道位置发生变动,因此定位技术无法完全准确指引机器人进行管道巡检。为保证机器人可准确按照管线路由位置进行跟踪,需考虑使用管道实探技术。该项技术主要利用海床自身磁场环境较为稳定,即使管道被泥沙所覆盖,利用磁力探测定位技术仍可较为准确的找到海底管道等强磁物质!。该项技术可避免因水下浑浊无法通过录像设备进行辨识的缺点。故通过在水下机器人加装磁力仪可更加准确定位管道的位置。
在利用无人机器人开展水下电位测量作业前应严格按照作业流程进行准备。其较为完整的流程如下:编制一份至少包含作业内容、范围、工作量;作业要求及条件;作业进度计划表;业主方及第三方检测机构要求;当地水文地质的方案。6.2 作业准备
根据作业方案组建检测小组,该小组应包含潜水监督、操作人员及其他保障人员,同时应保障分工明确,责任划分到位。特别是针对保障安全的响应设备尽量做到专人专管,并有相应的运转记录。水下机器人下水前,作业人员应全部就位,禁止单人操作作业。一般情况下,海上风力大于6级时,所有水下机器人不得开展相关作业。特别针对船只风力及海况(表2)、平台以及水下机器人内部结构的不同,在较为恶劣环境情况下能否开展水下作业也会有所不同。例如:出现较高风或者6级以上海况时,在稳定的平台上特定的水下机器人结构可以进行进下水作业。但相同情况下,如在工作母船上进行下水作业,就会给设备及人员带来危险。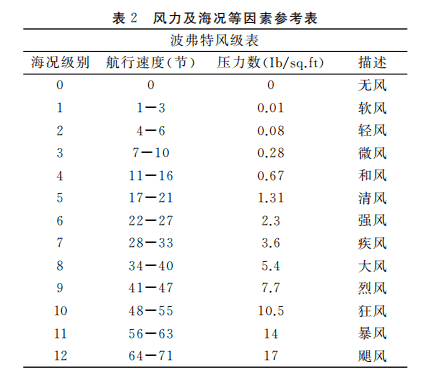
6.3工作前处理及标定
作业前应对施工区域进行障碍物清理,特别是钢结构表面的处理,应尽可能将表面附着物、腐蚀物去除,确保钢结构与接触头连接紧密。6.4 水下电位测点选择
应根据业主要求选择测点,并在阳极块的两端及中间部位分别进行测量,对于结构电位的测量应尽量选择在相邻阳极之间。6.5 电极校正
电位仪应在测量前浸泡于海水中 30分钟以上确保使用标准饱和甘汞电极在每次测量前、后与参考电极进行校正,并记下相应结果。6.6 牺牲阳极电位测量
将水下机器人运行至牺牲阳极附近并将仪器的探头对准待测点使其有良好的接触,在阳极块的两端及中间部位分别取点测量,被测数值应大体一致,若存在较大差异应重新测量,确保准确测量并将结果数据记录。6.7 海底集输管道的电位测量
水下机器人运行至海底集输管道附近,将仪器的探头对准待测量钢结构点使其有良好接触,钢结构的测点应选取在相邻两块阳极(或四块阳极之间)。无保护的普通钢结构电位应在一770毫伏左右。钢结构保护电位应在一850至-1100毫伏之间。当保护电位低于-850毫伏结构易腐蚀,高于-1100毫伏结构易产生析现象。电位测量部位应采用编号进行标记。6.8 水下机器人操作应急方案
水下机器人在水面以上出现故障时,因自身电源失效且未储备电源情况下,应尽可能将水下机器人下降至海底,并使用额外的脐带进行抛锚作业,并使用相应配重块使脐带缆下沉。其后确保其处于相对稳固位置并尝试进行较为安全的修复以唤醒水下机器人。若仍失败,则可启用母船上的后备动力设备以促使其进行相关作业。若液压吊机失灵且水下机器人处于相对安全位置,应尽可能尝试于现场修复吊机。如仍无法修复,则应设法使用母船吊机进行水下机器人水下作业。若水下机器人丧失液压动力能力时,应立即通知控制室或驾驶台,并采取下列措施:a)在尽可能保证水下机器人在水下的安全,并使水面以上或海底处于绝缘的状态下,尽可能尝试进行修复。
b)在必要情况下需水下机器人出水,则操作人员应在控制室内向所有相关人员及时报告水下机器人上升过程中写其他任何障碍物的相对位置。
c)水下机器人操作员应及时向监督及操作员报告实时深度,及其他与任何已知障碍物的相对位置或导航系统显示的方向。
d)接近出水面时,水下机器人位置可由脐带方向确定。应通知操作员使用机动方式将其带至出水点。
e)在较为恶劣海况下,应当在脐带上使用传送皮带或滚动滑轮放低配重块以便水下机器人可安全出水。待其浮出水面后,可采用正常作业程序。若水下机器人脐带受损或脐带发生部分断裂时,应等待至合适的天气尝试出水操作,但不要立即将其上提离开水面,应将其锁人状态后,再按相应程序离开水面。
6.9 检测报告
利用水下机器人完成相应的作业数据测量后:应对数据进行比对分析,确定是否存在不合理数据,并形成相应报告。报告应注明检测范围并记录测点情况、设备运行情况、结构图示、异常测量点情况并附录原始数据。报告应有验船师或业主方签字。利用水下机器人开展水下油气管道阴极保护检测是较为安全及高效的工程模式,开展该项工程应保障水下机器人有良好的环境选择、严格的操作制度以及相应的应急保障预案,特别是在保障设备及人员安全情况下开展计划性施工可获得相对较为可观的经济效益及工期时效。[1] 刘慧勇.海底管道检测技术研究与应用[J].化工管理,2021,(36):64-65.[2] 许立坤,马力,邢少华,等.海洋工程阴极保护技术发 展 评 述 [J].中 国 材 料 进 展,2014,33(2):106-113.
[3] 肖治国,李成钢.海底管道水下机器人检测技术[J].中国石油和化工标准与质量,2014,34(3):18.
[4] 刘晓阳,杨润贤,高宁.水下机器人发展现状与发展趋势探究[J].科技创新与生产力,2018,(6):19-20.
[5] TylerSchilling.2013stateof 水 下 机 器 人
technologies[J].MarineTechnologySocietyjournal,2013,47(5):69-71.
[6] ToshinobuMikagawa,MisumiAoki.Anout-
lineofR/V Kaireiandrecentactivityofthe
multichannel seismic reflection survey
system (MCS)and 水 下 机 器 人 Kaiko[J].Journalof marinescienceandtechnology,2001,6(1):42-49.
[7] 杨翔堃.在役海底管道阴极保护电位检测技术研究[D].大连理工大学,2021.
[8] Investigationonglobalpositioningsystemsignalscatteringandpropagationovertheroughseasurface[J].中国物理 B(英文版),2010,19(5):241-249.
[9] 沈克,严允,晏红文.我国深海作业级水下机器人技术现状及发展展望[J].控制与信息技术,2020,(3):1-7.
[10] 王亚儒.海底油气管道腐蚀失效风险及预警方法[J].化工管理,2022,(2):128-130.
[11] 宋辉.ROV 的结构设计及关键技术研究[D].哈尔滨工程大学,2008.
本文转载自智慧海洋公众交流平台公众号




