作者:中海油田服务股份有限公司 刘 林
1、装备原产地
自改革开放以来,我国越来越多地引进了大量的进口设备,如荷兰A.P.van denBerg Ingenieursburo bv公司的钻孔CPT、海床CPT、SMST公司的地质钻机,加拿大[SE公司的AUV,英国Applied Acoustics公司的电火花、美国的TRDI公司的海流计,Edgetech公司的4200系列旁扫声呐、剖等众多进口设备,进口设备目前已经成为国内海洋工程勘察行业的主流和主要装备,国产设备的技术水平虽然蒸蒸日上,但是在装备的测量精度、稳定性、对标国际工业标准等方面仍有加大差距。
2、海床CPT
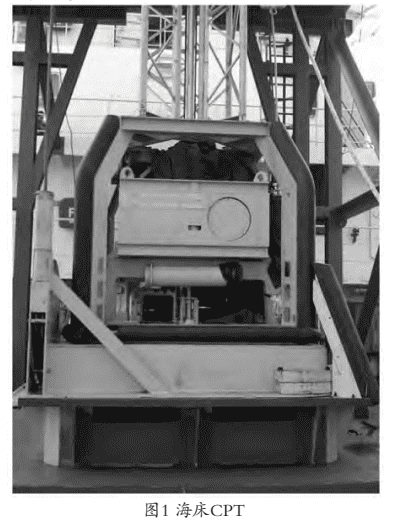
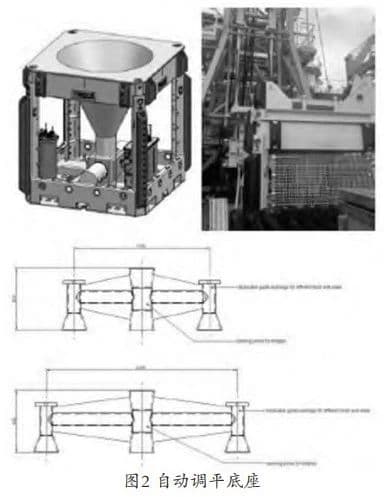
2.1 坡度适应能力
3、AUV
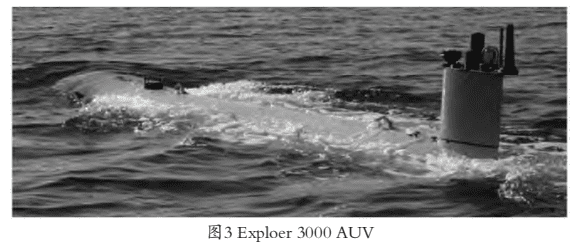
3.1 续航能力
3.2 定位精度
3.3 设备搭载能力
4、结束语
[1]吕福亮,贺训云,武金云,等.世界深水油气勘探形势分析及对我国深水油气勘探的启示[].海洋石油,2007(3):41-45.
[2]贾露瑾,田□,历超.深水应答器定位、导航技术研究[].科技风,2011(3):212-213.
[3]李保华,丁继胜,裴严良,等.海洋地球物理探测技术及其在近海工程中的应用[.海洋科学进展,2005(3):374-384.
[4]李军.MS1000旋转扫描声纳系统在近平台区域海底管缆及地貌调查中的应用中国科技纵横,2014(15).
[5]魏巍,马媛,苏洞甫,等.海底电缆工程海域使用动态监测技术探讨町.海洋开发与管理,2013,30(11):19-21.
[6]王兴芝,黄兆林,付琛,等.海洋深水区地震数据采集技术Ⅲ海洋地质前沿,2011(10):59-63.
作者简介:刘林,男,汉族,天津人,大学本科,中级工程物探工程师,研究方向:海洋工程勘察设备。
本文转载自智慧海洋公众交流平台
文章版权归原作者所有,如有发现侵犯您的权益,请后台联系编辑,我们会尽快删除相关侵权内容。